Team Torongo is the culmination of advanced research in embedded systems and autonomous navigation. Hailing from Polynomial Institute, where we solve the variables of innovation. We have been selected to compete on the global stage at RoboBoat 2026. Our mission is to deploy an Autonomous Surface Vehicle (ASV) capable of navigating complex maritime environments without human intervention. We are not just building a boat; we are developing a scalable maritime autonomy platform designed to tackle real-world challenges—from coastal surveillance to oceanographic exploration.
Research-Driven Innovation
Turning theoretical concepts into practical, real-world solutions through advanced R&D and experimentation.
Future Tech Leadership
Empowering the next generation through hands-on training, mentorship, and applied technology learning.
Engineering the
Torongo ASV
A fusion of hydrodynamic efficiency and edge-computing power.
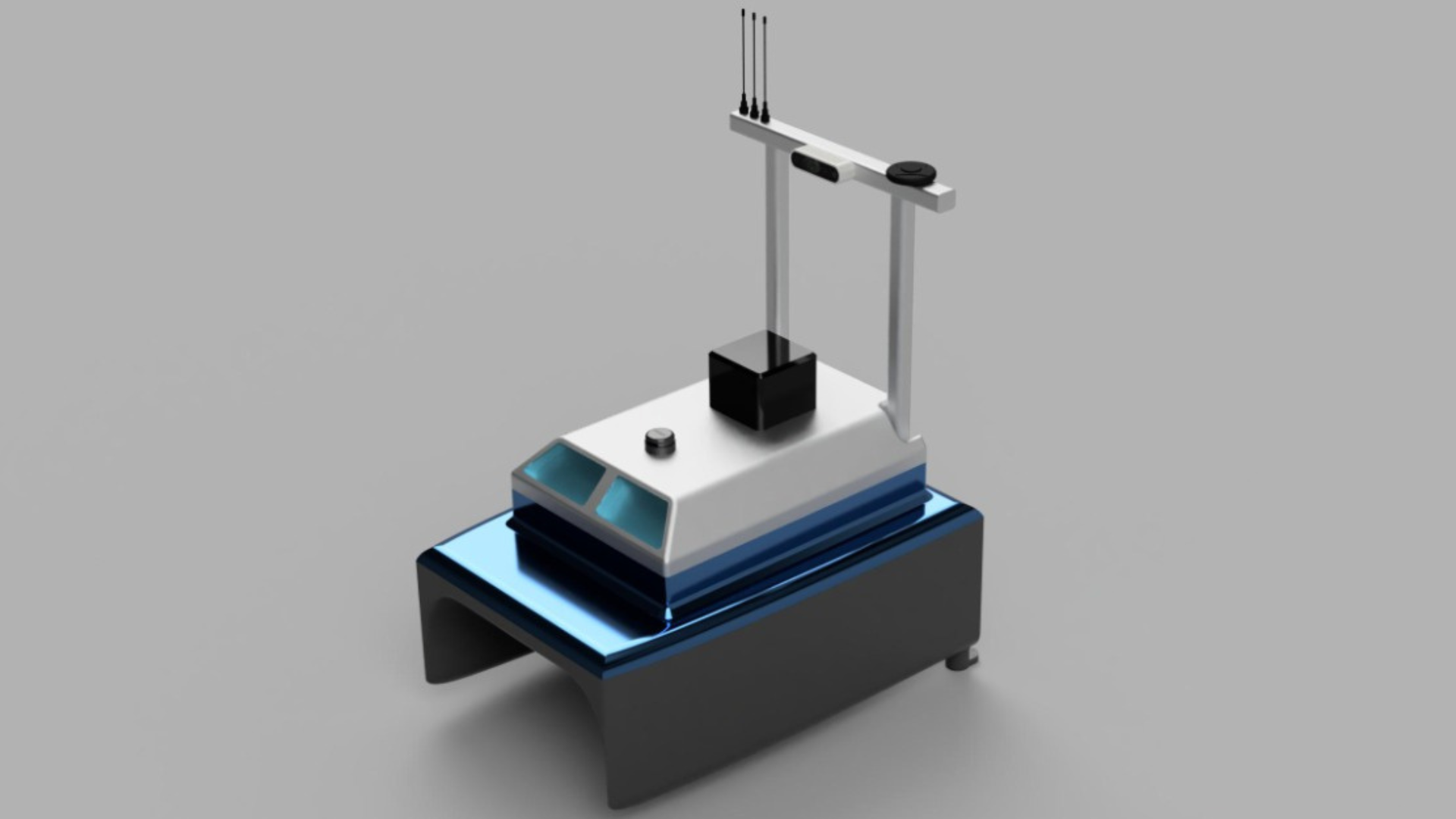
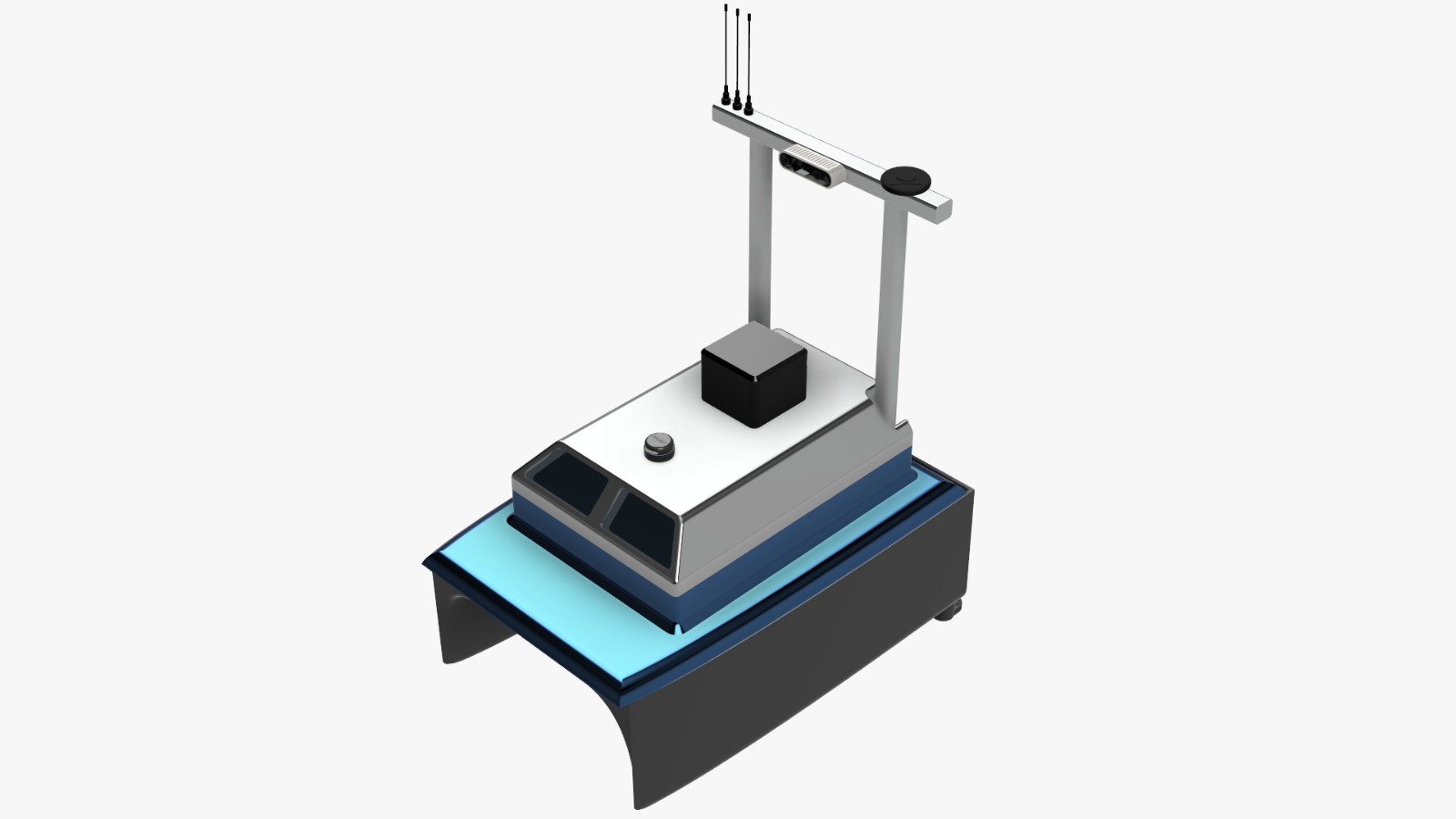
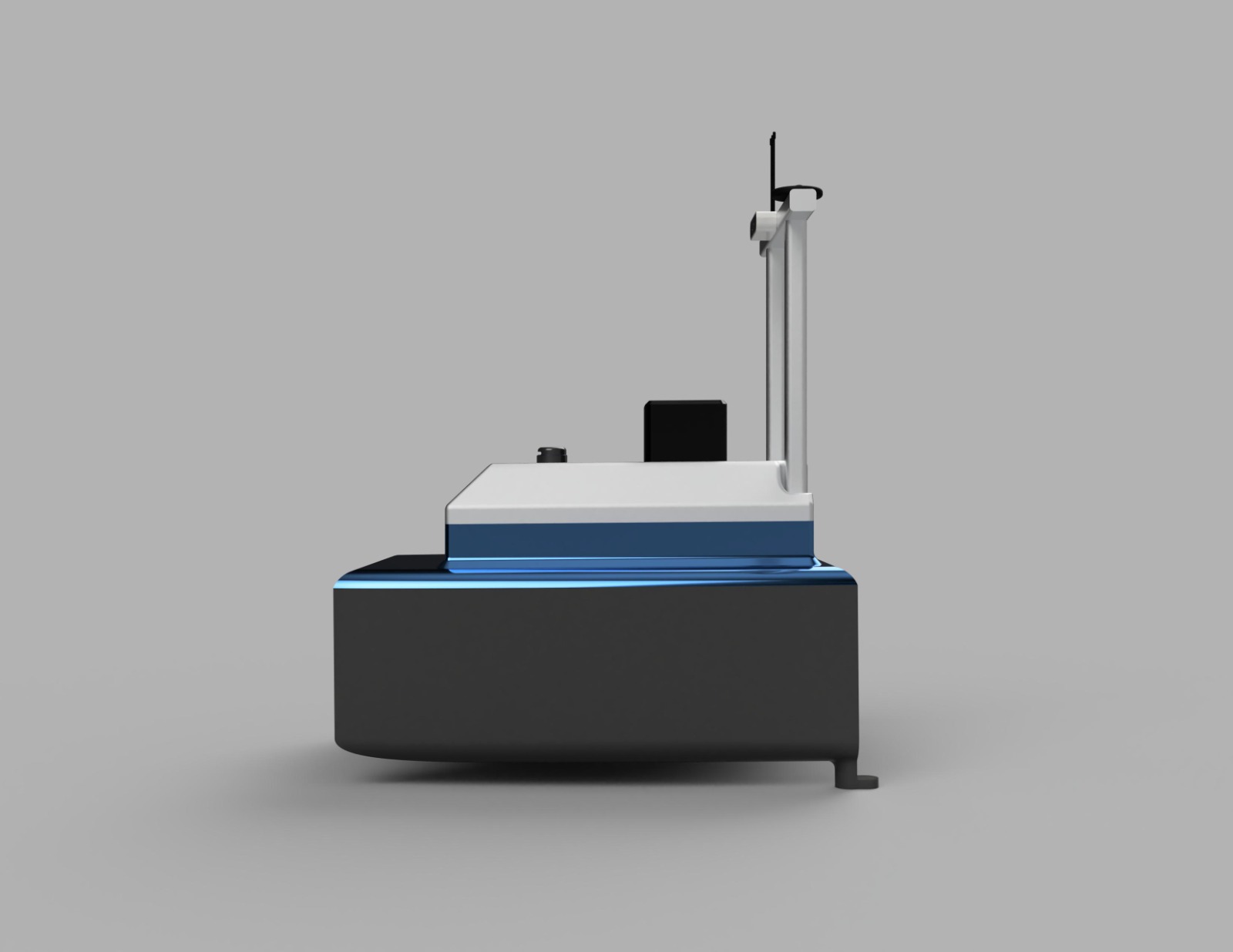
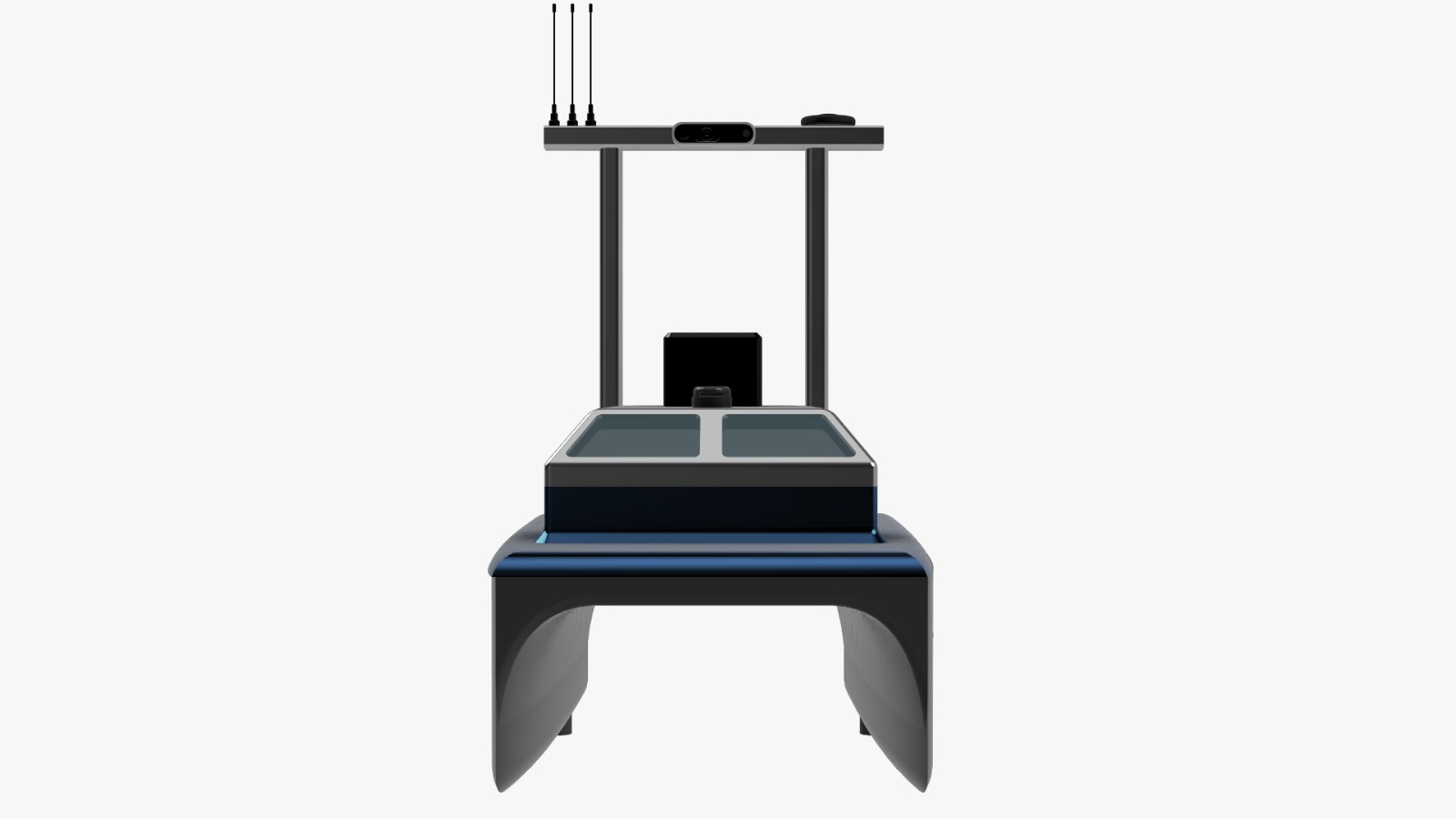
Hull & Mechanical Design
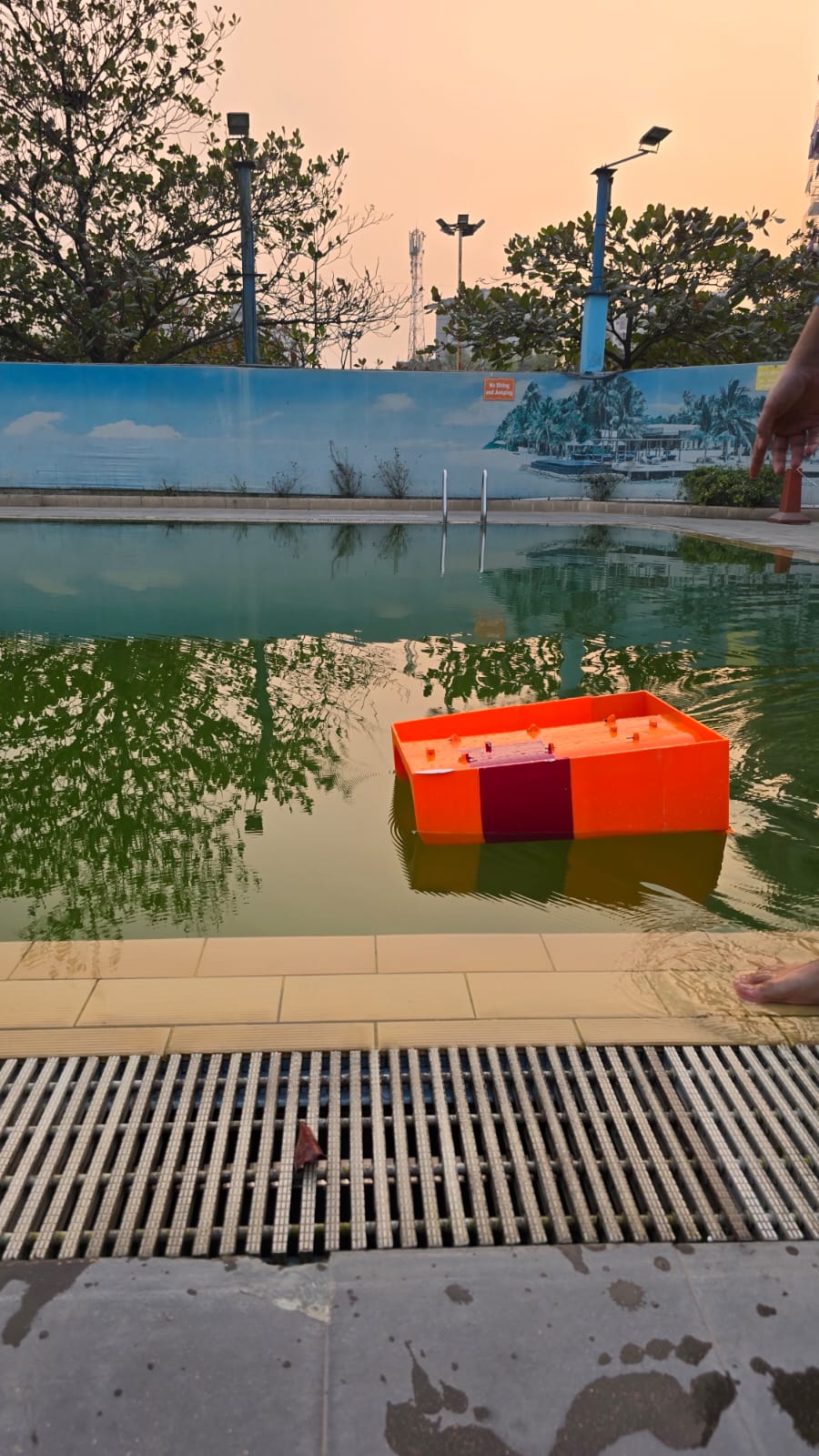
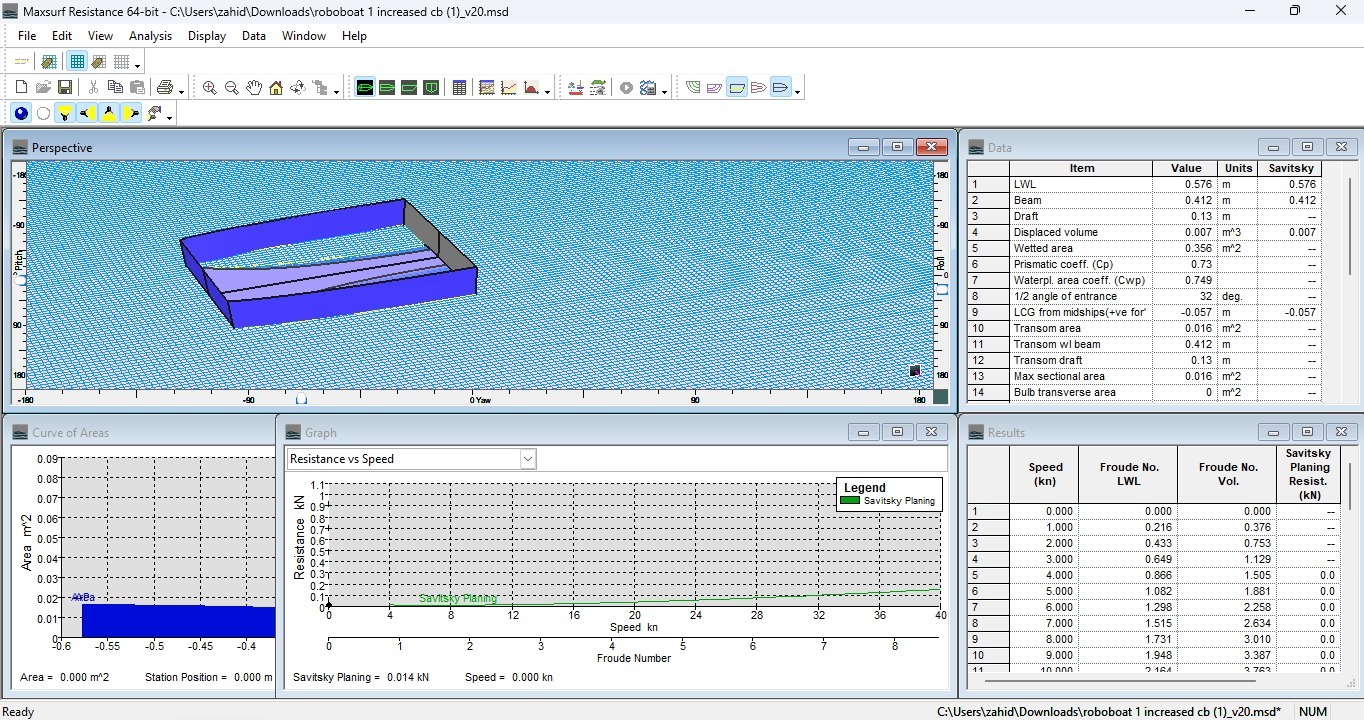
Torongo uses a twin-pontoon catamaran hull, selected for its excellent stability and redundancy. The hull was modeled in Fusion 360 and optimized using Maxsurf, with stability and resistance validated through simulation and the Savitsky planning method to ensure efficient propulsion.
The hull was 3D-printed in modular sections and fabricated using carbon-fiber-reinforced epoxy resin material with the 3D printed cast for its strength, low weight, and durability. Aluminum T-slot profiles allow flexible sensor mounting and future upgrades.
Dimensions: 590 mm × 412 mm × 200 mm
Propulsion & Control
The ASV uses four Blue Robotics T200 thrusters in an X-drive configuration, enabling omnidirectional movement (surge, sway, and yaw). This setup allows precise maneuvering during docking and obstacle-avoidance tasks.
Thrusters are driven by BLHeli ESCs, while stabilization and thrust mixing are handled by a Pixhawk Orange Cube, which actively compensates for wind and wave disturbances using onboard IMU data.
Electrical & Computing
Power is supplied by a high-energy INR21700 lithium-ion battery pack, providing full-mission endurance on a single charge. High-level processing runs on a Raspberry Pi 5 (16GB RAM), capable of real-time LiDAR mapping and depth-camera processing without latency. For safety, both hardware and software kill switches are implemented for immediate power shutdown.
Sensors & Communication
Torongo relies on a robust sensor suite for autonomous navigation:
RPLIDAR A3 for 360° object detection and mapping (25 m range)
Intel RealSense depth camera for color detection and close-range depth sensing
Integrated GPS and compass for positioning and heading
Dual-band Gemini-X radio for manual override and testing
Live telemetry, including battery status and system health, is transmitted to the shore station via Wi-Fi.
Testing & Validation
The ASV underwent extensive simulation and real-world testing:
Hydrodynamic and structural validation using Maxsurf
Software testing in a simulated competition environment
Long-duration water tests for leak detection
Tank testing and calibration of thrusters and ESCs
Outdoor validation of LiDAR range and vision accuracy
Final autonomous testing is ongoing in a competition-style environment to eliminate remaining imperfections.
Result
Torongo’s design combines hydrodynamic stability, precise omnidirectional control, reliable sensing, and robust autonomy, delivering a competition-ready ASV optimized for real-world performance.
✦ Project Philosophy
Strategic Autonomy
Our strategy for RoboBoat 2026 prioritizes reliability over raw speed. By utilizing a modular software architecture, Team Torongo can adapt to dynamic mission tasks such as the Acoustic Docking and Object Delivery challenges, in real-time. We are not just building a boat; we are developing a scalable maritime autonomy platform designed to tackle real-world challenges, from coastal surveillance to oceanographic exploration.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}